Abstract
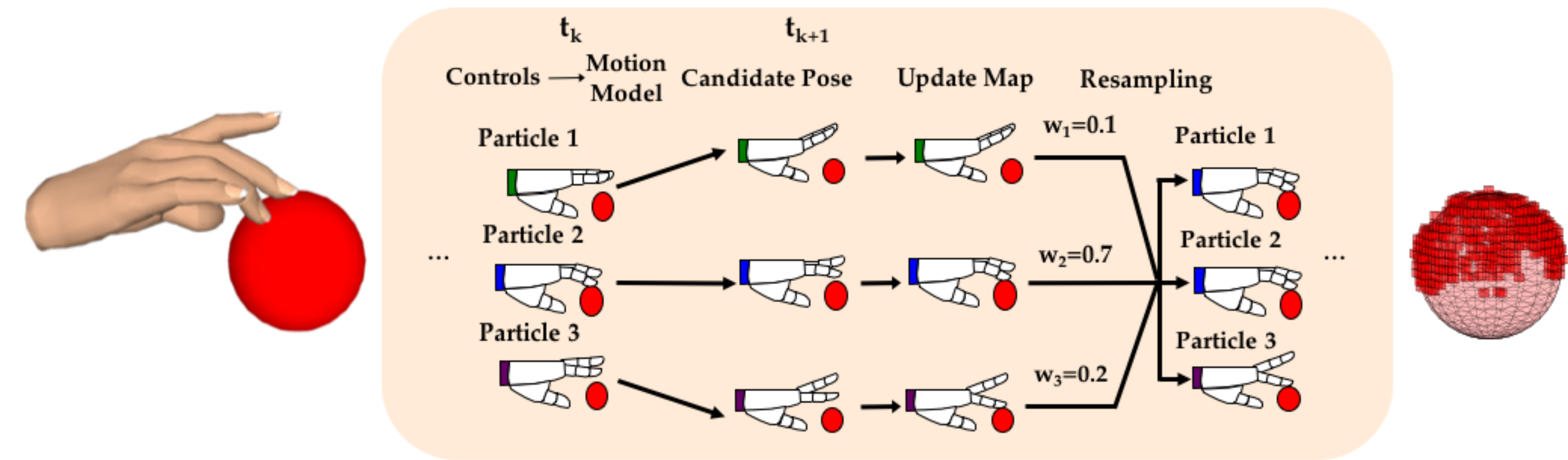
Dynamic tactile exploration enables humans to seamlessly estimate the shape of objects and distinguish them from one another in the complete absence of visual information. Such a blind tactile exploration allows integrating information of the hand pose and contacts on the skin to form a coherent representation of the object shape. A principled way to understand the underlying neural computations of human haptic perception is through normative modelling. We propose a Bayesian perceptual model for recursive integration of noisy proprioceptive hand pose with noisy skin–object contacts. The model simultaneously forms an optimal estimate of the true hand pose and a representation of the explored shape in an object–centred coordinate system. A classification algorithm can, thus, be applied in order to distinguish among different objects solely based on the similarity of their representations. This enables the comparison, in real–time, of the shape of an object identified by human subjects with the shape of the same object predicted by our model using motion capture data. Therefore, our work provides a framework for a principled study of human haptic exploration of complex objects.